publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2025
-
 Diffusion-Based Generative Models for 3D Occupancy Prediction in Autonomous DrivingYunshen Wang, Yicheng Liu, Tianyuan Yuan, Yucheng Mao, Yingshi Liang, Xiuyu Yang, Honggang Zhang, and Hang Zhao2025
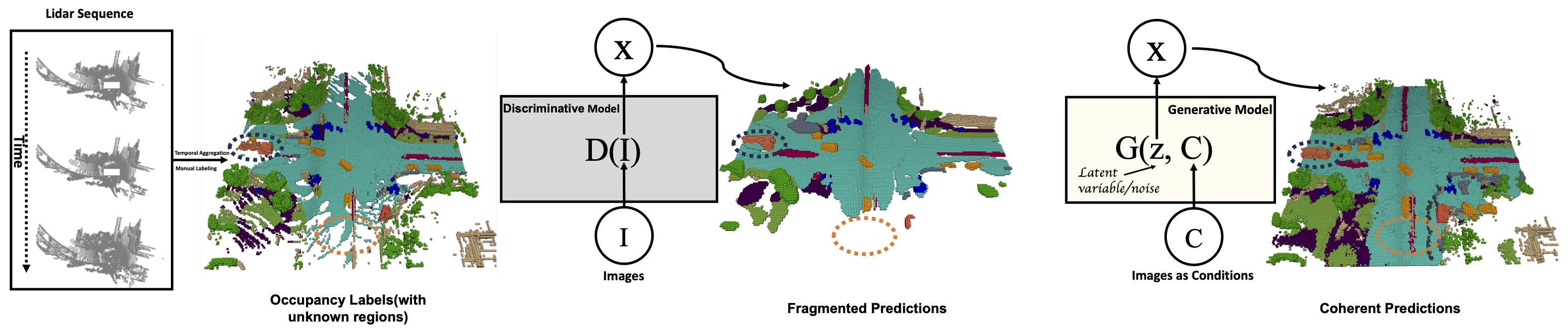
Diffusion-Based Generative Models for 3D Occupancy Prediction in Autonomous DrivingYunshen Wang, Yicheng Liu, Tianyuan Yuan, Yucheng Mao, Yingshi Liang, Xiuyu Yang, Honggang Zhang, and Hang Zhao2025Accurately predicting 3D occupancy grids from visual inputs is critical for autonomous driving, but current discriminative methods struggle with noisy data, incomplete observations, and the complex structures inherent in 3D scenes. In this work, we reframe 3D occupancy prediction as a generative modeling task using diffusion models, which learn the underlying data distribution and incorporate 3D scene priors. This approach enhances prediction consistency, noise robustness, and better handles the intricacies of 3D spatial structures. Our extensive experiments show that diffusion-based generative models outperform state-of-the-art discriminative approaches, delivering more realistic and accurate occupancy predictions, especially in occluded or low-visibility regions. Moreover, the improved predictions significantly benefit downstream planning tasks, highlighting the practical advantages of our method for real-world autonomous driving applications.
-
 Humanoid Diffusion ControllerYunshen Wang, Shaohang Zhu, Jingze Zhang, Jiaxin Li, Yixuan Li, Tengyu Liu, and Siyuan Huang2025
Humanoid Diffusion ControllerYunshen Wang, Shaohang Zhu, Jingze Zhang, Jiaxin Li, Yixuan Li, Tengyu Liu, and Siyuan Huang2025We introduce the Humanoid Diffusion Controller, the first diffusion-based generative controller for real-time whole-body control of humanoid robots. Unlike conventional online reinforcement learning (RL) approaches, HDC learns from large-scale offline data and leverages a Diffusion Transformer to generate temporally coherent action sequences. This design provides high expressiveness, scalability, and temporal smoothness. To support training at scale, we propose an effective data collection pipeline and training recipe that avoids costly online rollouts while enabling robust deployment in both simulated and real-world environments. Extensive experiments demonstrate that HDC outperforms state-of-the-art online RL methods in motion tracking accuracy, behavioral quality, and generalization to unseen motions. These findings underscore the feasibility and potential of large-scale generative modeling as a scalable and effective paradigm for generalizable and high-quality humanoid robot control.